使機器人作業實現循環時間
追求快速性和振動控制性的輕質、高剛性的SRA
進而提高了全軸速度,也縮短了氣割動作時間
由此使生産性得到了飛躍性的提高
電纜内置中空手臂在中空結構的手臂中簡潔地安裝焊接電纜和軟管類
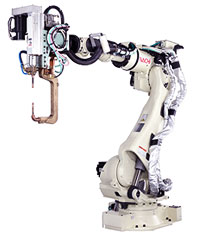
點焊的專家。安裝了保護點焊所需的各種電纜的A-trac4
更快更切實地使機器人作業實現較短的循環時間。追求快速性和減震性的重量輕、高剛性的SRA。進而提高了全軸速度,也縮短了氣割動作時間。由此使生産性得到了飛躍性的提高
使用方便。通過新的機械元件和電機驅動控制,提高複位精度和驅動系的可靠性。通過緊湊的本體,可進行更高緊密的設置
節能、節源。 舊款機型相比減輕20%重量的機器人本體以及采用新的電機驅動控制的速度控制,實現了電力比舊款機型降低15%的目标
緊湊×高性能
緊湊的手臂結構,可進行高密度設置超高速機器人SRA系列的高速控制 實現世界頂級水平的生産效率
充足的搬運能力。可搬重量:100kg手腕扭矩:580N・m(J4/J5軸)